INTELLIGENCE FOOD DISTRIBUTOR ROBOT FOR MEETING AND CONFERENCE PURPOSE
GROUP MEMBERS
1. AZHAR B. MOHD IBRAHIM 0530425
2. MUHAMMAD ASLAM B. ROSLE 0536287
3. NOR AZHAR B. MOHAMED 0538909
4. ISHRAQI ILYAS 0534635
5.M. MOSTAFA AL-MADANI 0122991
PROJECT MISSIONS
i)Produce a functional autonomous robot for serving water or food during either meeting or convention session.
ii)Equip the robot with intelligence system and embedded with flexible function during its operation.
iii)Satisfy the quality of water/ food delivering service according to customer requests.
PROJECT DESCRIPTION
Function :
Intelligence Food Distributor Robot is used to serve the food during meeting or conference session with easy accessibility and without interrupting others.
Basic Operation :
i) Robot automatically follows the track on round table.
ii) Robot will stop at particular place and serve the food when someone request for food through button.
Figure below shows that Robot (black square) will follow the line (purple color) and will stop at the each particular place to serve the food during meeting.

CUSTOMER TARGET
The Intelligence Water/Food Distributor Robot products are targeted for group marketing that handling meeting/conference especially in:
1 Industrial And Business Companies, Firms
2 Education Institutions
3 Government Agencies
PRIVILEGES
This invention offers:
• Automatic service for food distributing.
• Fast and efficiencies food distributor without interrupting others during
conference.
• Easy accessibility for any request by just pressing a button.
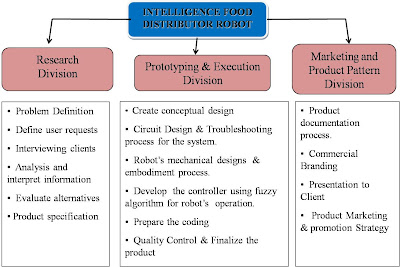
PRODUCT PLANNING

WORK BREAKDOWN STRUCTURE (WBS)
LINEAR RESPONSIBILITY CHART (LRC)

TEAM CALENDAR

GANTT CHART
 PROJECT BLOG
PROJECT BLOG
http://kakirobot.blogspot.com




 Alternative 1
Alternative 1 Alternative 2
Alternative 2 Alternative 3
Alternative 3










{kind=link}